

当大多数车厂仍在研究如何提升电动车续航里程时,Ferrari已经把目光放在另一个层面——如何让未来的高性能电动车拥有比传统超跑更出色的操控表现。
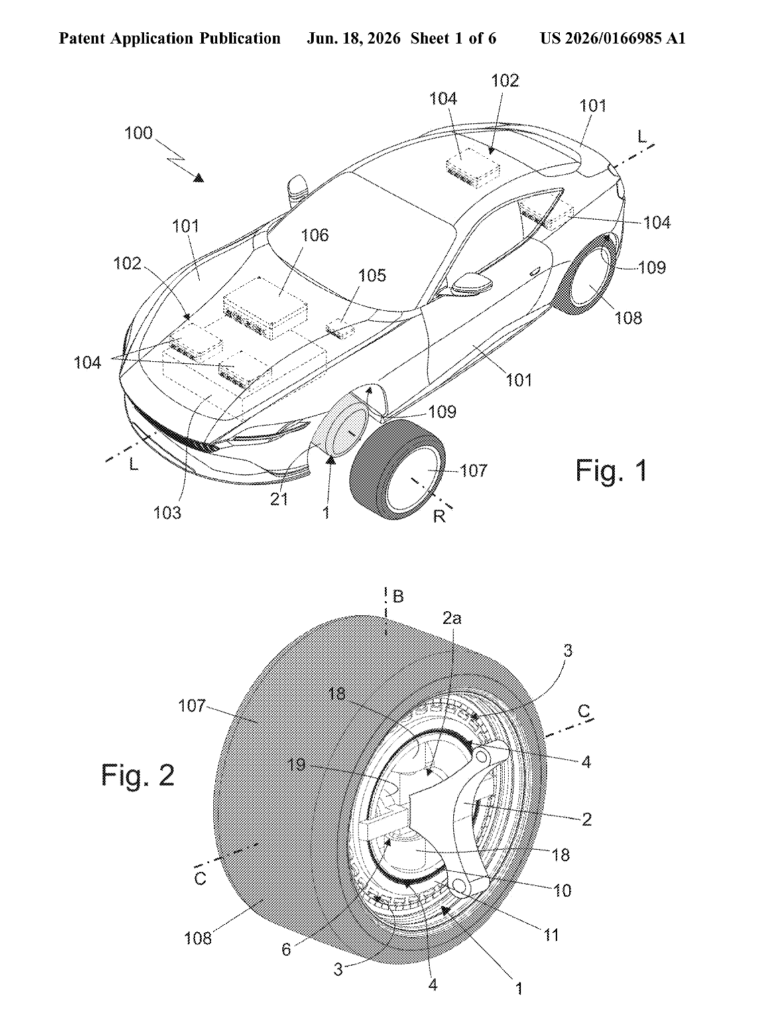
近日曝光的一项Ferrari最新专利显示,这家来自意大利的超级跑车制造商正在开发一套结合轮毂电机与主动悬挂系统的全新技术架构。相比单纯增加马力或电池容量,这项研发更专注于车辆动态表现,希望让未来Ferrari在高速过弯、加速稳定性以及驾驶乐趣方面达到全新水平。
在汽车工程领域,轮胎与路面的接触面积始终是影响操控表现的关键因素之一。而决定轮胎接地状态的重要参数,则包括外倾角(Camber)以及前束角(Toe)。
一般传统汽车在出厂时都会预先设定这些数据,以取得操控、舒适性以及轮胎磨耗之间的平衡。然而这种设定属于固定式结构,无论车辆是在市区慢速行驶、高速巡航还是激烈攻弯,悬挂几何角度都无法主动改变。
Ferrari显然认为,这种传统思维已经无法满足未来高性能电动车的发展需求。
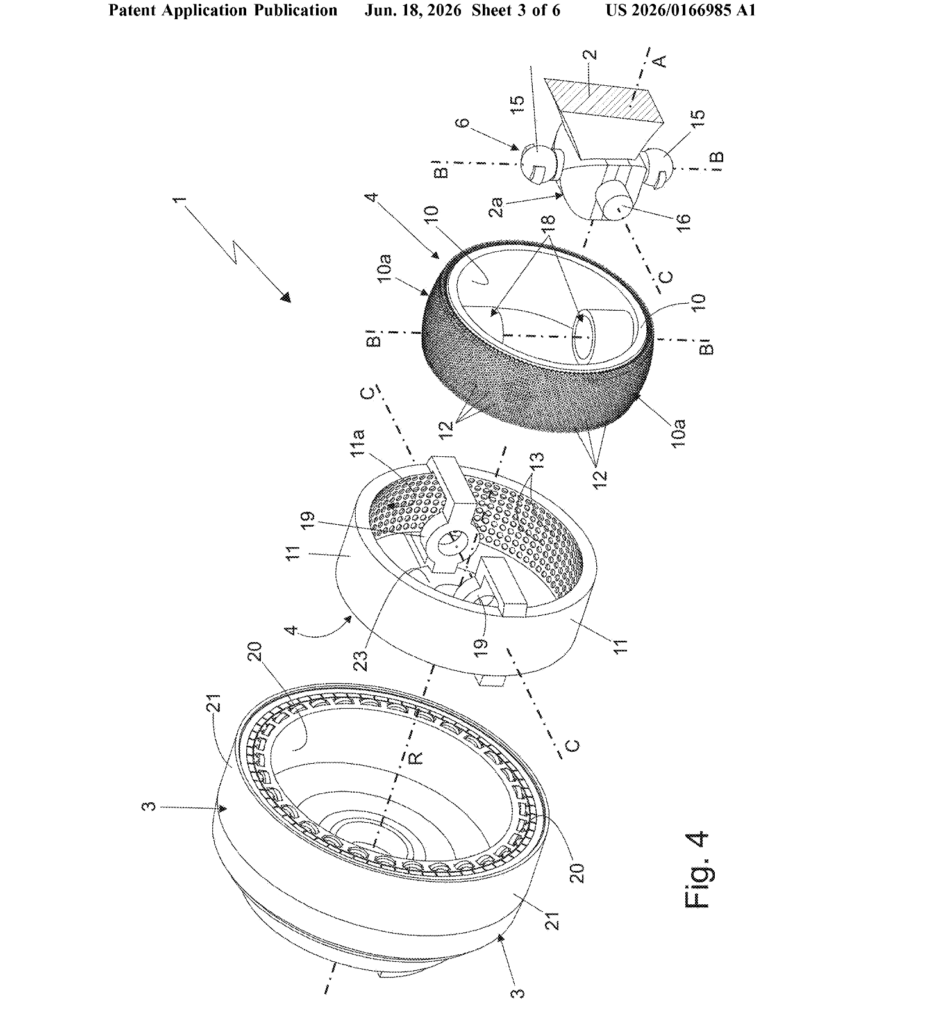
根据专利内容显示,Ferrari计划透过先进电子控制系统,让车辆能够实时调整四个车轮的外倾角和前束角。简单来说,当车辆进入不同驾驶状态时,底盘系统会自动改变轮胎与路面的接触方式,从而获得最佳动态表现。
例如在日常城市驾驶环境下,系统会维持较中性的设定,以减少轮胎磨耗并提升舒适性。而当驾驶者进入山路或赛道时,系统则会自动增加负外倾角,让轮胎在高速过弯过程中拥有更大的接地面积,从而提升抓地力和弯道极限。
对于Ferrari来说,这种技术最大的优势在于能够同时兼顾性能与实用性。
传统高性能跑车为了追求极限操控,通常会采用较激进的悬挂设定。然而这样的配置往往导致轮胎磨耗加快、乘坐舒适性下降,并不适合日常使用。
如果主动悬挂能够实时调整轮胎角度,那么车辆便能够根据实际情况自由切换不同模式,在舒适与性能之间取得最佳平衡。
更值得关注的是,这项技术并非独立存在。
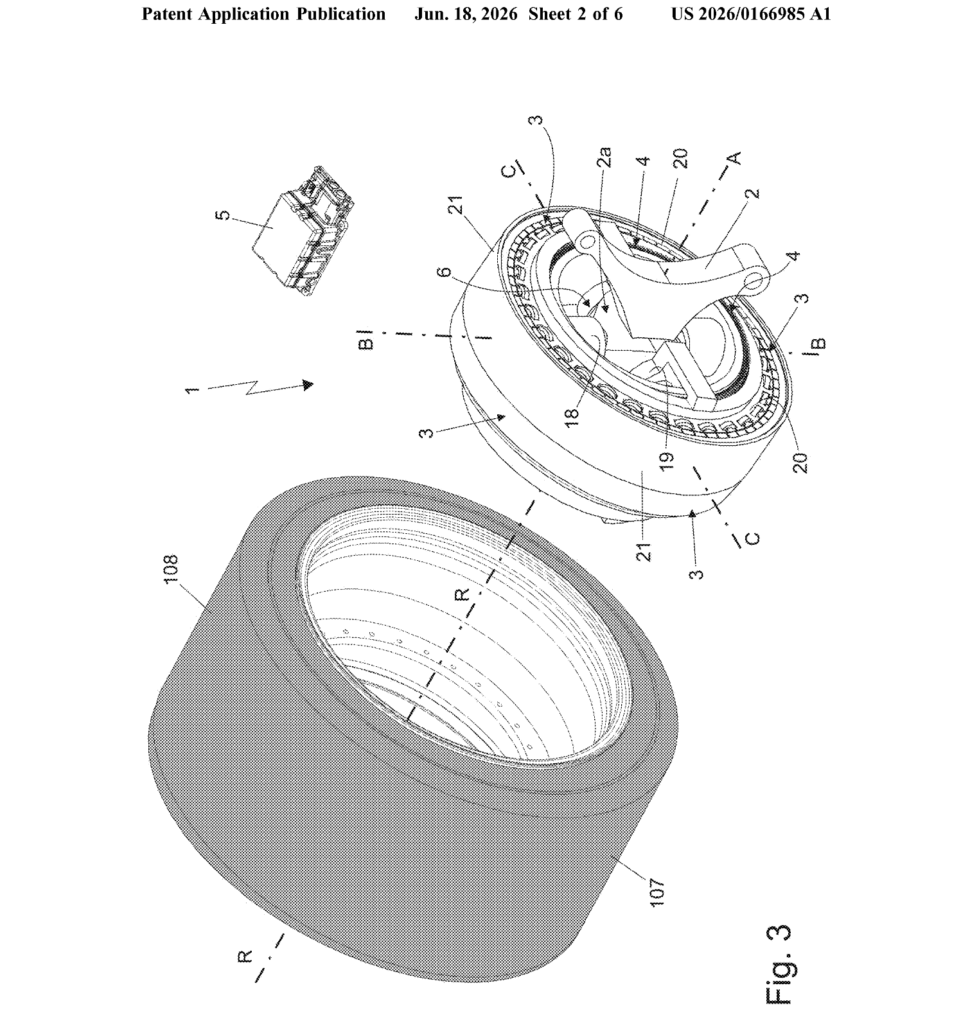
从专利图可以发现,Ferrari同时研究轮毂电机技术的发展方向。
所谓轮毂电机,是将电动马达直接整合在车轮内部,而非传统集中式电驱系统。这种设计最大的优势在于每个车轮都能独立控制动力输出。
一旦与主动外倾角系统结合,车辆将拥有前所未有的动态控制能力。
举例来说,当车辆进入弯道时,电脑不仅能够调整每个车轮的动力分配,还能同步改变轮胎角度,使每个车轮始终维持最佳抓地状态。
这种控制精度远远超越现有四轮驱动系统与电子差速器所能达到的水平。
事实上,近年来越来越多高端品牌开始探索类似技术路线。
包括Mercedes-AMG、Porsche以及Rimac等品牌都在积极开发先进电子底盘系统,希望利用电动车架构优势突破传统机械极限。
然而Ferrari此次曝光的专利更加激进,因为它试图将动力输出、悬挂几何以及车辆动态控制整合为单一系统。
对于一向强调驾驶乐趣的Ferrari而言,这项技术的意义并不仅仅是提升速度。
Ferrari长期以来坚持“驾驶者与车辆之间的连接感”是品牌核心价值。因此未来主动悬挂系统并不会完全取代驾驶者,而是通过更精准的数据运算协助驾驶者发挥车辆潜力。
换句话说,Ferrari希望科技成为驾驶体验的延伸,而非取代驾驶本身。
随着品牌首款纯电超跑预计未来几年内正式登场,外界普遍认为这项专利很可能成为未来电动车产品的重要技术基础。
毕竟当传统V8与V12引擎逐渐被电动马达取代后,Ferrari必须寻找新的方式来维持品牌独有的驾驶魅力。而先进底盘控制系统,很可能就是其中关键答案之一。
当然,专利并不代表一定会立即投入量产。
汽车产业中许多创新概念最终未必会出现在市售车型上。不过从Ferrari近年来持续加大电气化研发投资来看,这项技术具备相当高的实际应用可能性。
如果未来成功量产,那么Ferrari或许将开启超级跑车发展的全新时代。
届时,衡量一辆超跑性能的标准可能不再只是马力、扭力或极速数字,而是车辆如何通过智能底盘系统与轮胎控制技术,将每一匹动力更有效地转化为驾驶乐趣。
对于全球车迷而言,这或许比单纯增加几百匹马力更加令人期待。